


Malgré la complexité du développement technologique de la mobilité autonome, il semble plausible que des véhicules entièrement autonomes finissent par circuler sur nos routes et dans nos villes. Ces véhicules vont devoir partager l’espace routier avec les véhicules conventionnels pendant encore de longues années. Passé les premiers déploiements expérimentaux en conditions favorables (marquages au sol contrôlés, aménagements routiers spécifiques), les véhicules autonomes subissent actuellement l’épreuve du feu aux États-Unis, leur circulation sur routes réelles ayant été autorisée dans plusieurs états.
Ce retour d’expérience, notamment par le suivi rigoureux des accidents, a permis de révéler des difficultés de circulation, et les rares accidents mortels ont sérieusement freiné la communication optimiste des constructeurs automobiles. Des recherches et des réflexions sont encore nécessaires pour organiser les conditions d’une cohabitation harmonieuse et réussie entre humains et robots, pour un système de mobilité efficace et sécurisé.
Le projet auquel nous participons, « Sécurité des usagers de la route et conduite automatisée » (SURCA), s’est interrogé sur les moyens d’assurer une meilleure intégration de la conduite automatisée dans la circulation automobile actuelle.
Les partenaires du projet (Université Gustave Eiffel, DSR, Ceesar, Cerema, Vedecom, Lab), ont cherché à identifier les interactions et stratégies mises en place par les conducteurs dans certaines situations d’interactions considérées comme difficiles pour un véhicule autonome. Les recommandations émises concernent différents aspects de la conduite, comme les changements de voies sur autoroute, les remontées de files des deux-roues motorisés, les carrefours à feux, avec ou sans cyclistes, trottinettes ou piétons, ainsi que des situations plus complexes aux limites des capacités du véhicule autonome pour lesquelles la meilleure recommandation consiste à s’arrêter en sécurité et redonner le contrôle au conducteur. Cela peut être le cas pour pénétrer dans un rond-point, ou pour des situations de congestions, lorsque « forcer délicatement le passage » reste la seule option.
Les voitures autonomes sont-elles meilleures conductrices que les humains ?
Les véhicules autonomes ont de nombreux avantages sur les humains dans la plupart des conditions : une caméra thermique détectera mieux les piétons dans le brouillard, et un freinage d’urgence sera plus rapide et puissant s’il est contrôlé par une puce électronique et un système hydraulique. Pour autant, les intelligences artificielles (IA) qui orchestrent les décisions et actions des véhicules autonomes apprennent laborieusement et peinent encore à anticiper les comportements humains du fait de la grande variété des situations à prendre en compte.
Notre projet, croisant regard d’experts et analyse des accidents et des comportements, a permis d’identifier certaines situations de conduite comme étant difficiles à gérer du point de vue du véhicule autonome. Si l’on s’en tient aux interactions entre véhicules légers, on retient quatre situations : les manœuvres en intersection, les ronds-points, les changements de file et de voies sur voies rapides.
Le cas particulier des scénarios en intersection, bien que très commun, est emblématique des interactions complexes qui interviennent entre les humains, et de la difficulté pour les véhicules autonomes à les reproduire. En effet, si l’on s’en tient aux statistiques américaines concernant les accidents impliquant des véhicules autonomes, ceux-ci ne sont que très rarement en tort.
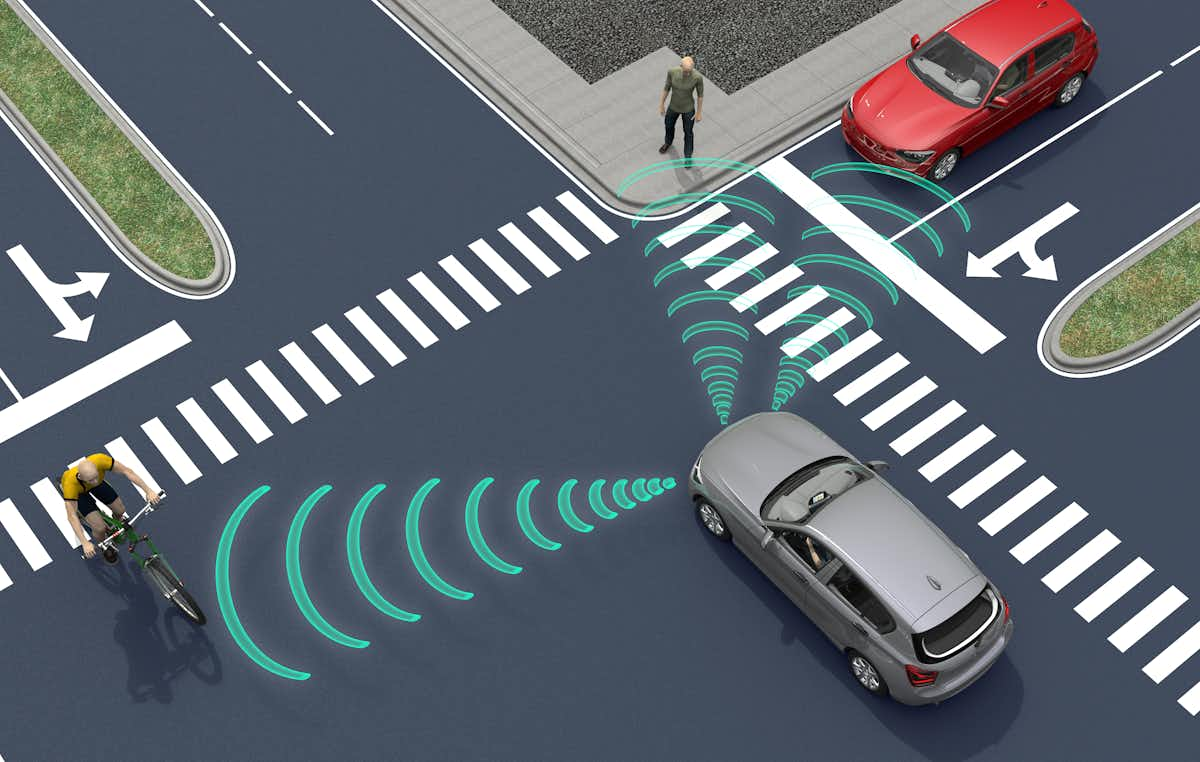
Une voiture autonome est capable de détecter piétons, cyclistes et voitures, mais ne réagira pas comme un conducteur humain. Posteriori/Shutterstock
Cependant, plus de 60 % des accidents observés sont des cas où le véhicule autonome s’est fait percuter par l’arrière lors d’une décélération en approche d’une intersection. C’est presque deux fois plus que la fréquence estimée pour les conducteurs humains. Ainsi les véhicules autonomes sont-ils nettement plus souvent heurtés par l’arrière (62 %) que les véhicules conventionnels (4 %).
Humains et IA peuvent-ils se comprendre ?
Y aurait-il un problème de compréhension entre IA et humains ? Ou simplement une grande différence de comportement ? Les données manquent encore pour expliquer cette observation, le fonctionnement exact des véhicules autonomes relevant encore du secret industriel. Mais il est probable que deux phénomènes soient impliqués : le rigoureux respect du code la route par le véhicule autonome combiné à de grandes marges de sécurité, et la difficile anticipation par les humains des décisions de ce nouvel objet roulant.
On sait le rôle que peut jouer un geste ou un échange de regards entre conducteurs et piétons afin de clarifier les intentions réciproques. Mais malgré quelques expérimentations visant à communiquer les intentions du véhicule autonome aux piétons ou à prédire les intentions des piétons, l’utilisation de tels indices reste encore un horizon lointain pour les véhicules autonomes. La compréhension mutuelle doit s’appuyer sur d’autres formes d’interactions.
En effet, les interactions entre humains ne se réduisent pas à des interactions explicites telles que nos échanges de regards. Rien que notre manière de décélérer avec notre véhicule est porteuse d’informations implicites utiles pour aider les autres usagers à prédire nos intentions.
Les analyses réalisées dans le projet ont permis de mettre en évidence des décélérations plus tardives et plus fortes lorsque les conducteurs sont en présence d’un panneau stop comparé à un cédez-le-passage. De même, la seule présence d’un piéton près d’une intersection urbaine entraîne chez les conducteurs une réduction des vitesses de 5 km/h. Ainsi, ralentir en amont d’un passage piéton est un signal envoyé montrant que vous êtes attentifs à laisser la priorité, ce qui aidera le piéton à prendre sa décision en prédisant plus précisément la vôtre. De manière identique, les jeunes conducteurs apprennent à vérifier la proximité avec le véhicule de derrière avant tout freinage. En effet, les engins de déplacement personnel motorisé (EDPM) comme les trottinettes électriques se mélangent au trafic routier, mais ont des performances de freinages très inférieures aux autres véhicules, les rendant vulnérables aux freinages brusques.
Ainsi le véhicule autonome doit-il, comme les humains, veiller à la sécurité de ses occupants, mais aussi à celle des autres usagers du réseau routier. Cela nécessite d’éviter les freinages brusques superflus et de prendre en compte le trafic environnant.
De nouvelles recommandations
Notre projet a donc émis la recommandation que les véhicules autonomes doivent adapter leur cinématique de freinage au contexte de sa réalisation (type d’aménagements, usagers présents) pour se rapprocher du comportement d’un véhicule conduit par un conducteur humain afin d’éviter de surprendre les autres usagers.
Autrement dit, le véhicule autonome devrait adopter une approche mimétique, cherchant à reproduire certains comportements humains porteurs de sens pour éviter tout effet de surprise. Or les styles de conduite diffèrent entre pays, et parfois même le Code de la route. Dès lors, les IA pilotant les véhicules autonomes devront apprendre de chaque culture, en utilisant des données représentatives de celle-ci.
Mais le mimétisme a ses limites et nombre de nos comportements et usages peuvent être en infraction avec le Code de la route. Pour des raisons éthiques et morales, le véhicule autonome ne mimera pas nos excès et nos erreurs, mais restera un exemple de bonne conduite sur la route. Il aura probablement encore besoin de nous pour s’immiscer dans un rond-point saturé, ou pour gérer un évènement atypique.
Ainsi, les véhicules pilotés par l’IA apprendront certains de nos comportements sociaux, mais nous devrons aussi apprendre du leur. Pour cela, il nous faudra pouvoir identifier les véhicules circulant en mode autonome, pour mieux prédire leur comportement spécifique si respectueux des règles. Il sera vraisemblablement nécessaire de garantir que le mode autonome soit parfaitement identifiable.
À ce stade, force est de constater que les véhicules autonomes ont encore des efforts à faire pour être compris et acceptés par le grand public.
Guillaume Saint Pierre, Chercheur en mathématiques appliquées, Cerema et Lara Désiré, Chercheuse, Cerema
Cet article est republié à partir de The Conversation sous licence Creative Commons. Lire l’article original.